
High school junior Daniel Kim is trying to make a difference by reducing the trash through an OceanAI by creating an autonomous submarine designed to identify this trash that is found underwater. He has chosen to release the CAD files and the source code through an open source license which are now available on the OceanAI GitHub repository.
Trash Identification
This project aims at creating an autonomous underwater vehicle (AUV) that utilizes cameras, sensors, a microcontroller, and GPS to categorize, identify, and map underwater trash.
“Detection of litter will be performed with a deep learning model optimized to run on a microcontroller which allows for cheap and power-efficient inference of underwater footage” Kim was quoted as saying on the OceanAI effort.
Every year billions of pounds of trash and pollutants make its way into the oceans of the earth. Almost two-thirds of the pollutants end up in the beach, swept in with the waves and tides or flowing out of sinks or drains. Some ends up eaten by the marine animals thinking of it as food.
Our ocean and waterways are polluted with a wide variety of marine debris, ranging from tiny micro plastics, smaller than 5 mm, to derelict fishing gear and abandoned vessels.
All marine debris comes from humans with a majority of it originating on land and entering the ocean through littering, poor waste management practices, and storm water discharge, and extreme natural events such as tsunamis and hurricanes.
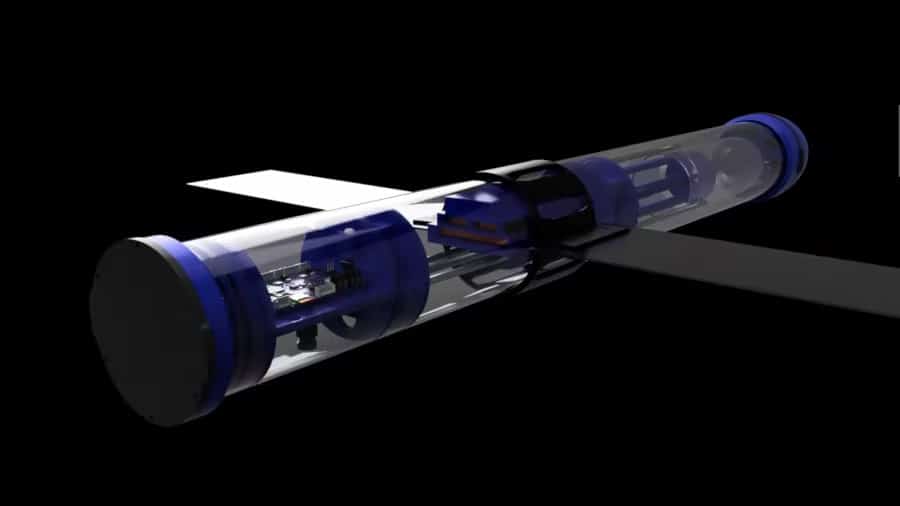
This rocket-like “underwater glider” provides a low-cost approach to finding ocean trash. The control board, software, and vehicle design have all been completed, complete with a “Command Centre’ user interface that provides readouts of system status and hardware health.
The submarine or the “Underwater Glider” as Kim calls it is a tube that is shaped like a rocket with a rounded nose cone that has two large wings to the side that gives its namesake.
Technology Implemented

The software includes a smart software control panel built using ElectricUI which is used to equip engineers, researchers, and enthusiasts with software to build cross-platform user interfaces for real-time hardware visualisation and control.
The tube inside has a ballast tank to allow the submarine to rise and sink and give it hydrostatic stability, batteries for untethered use, and a custom control board, which includes connectivity to a sensor board with dissolved solids sensor, a pressure sensor, a thermistor whose resistance is strongly dependent on temperature, and the camera that will eventually provide input to the trash-seeking Artificial Intelligence (AI) that is on board the submarine.
A transmitter board is designed to sit outside the submarine on the water’s surface in order to provide access to global navigation satellite system (GNSS) radio signals and to transmit to a controlling terminal which uses the data to determine the location.






